
源码解析基于Android 11
前言
1、init进程是什么
2、init进程是如何启动的
3、init进程启动之后做了什么
1 init进程的概述
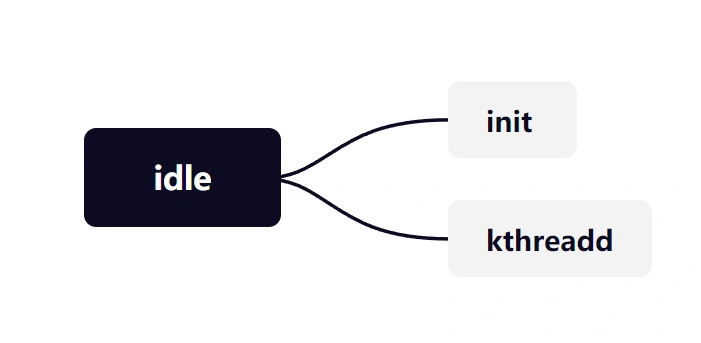
Linux内核启动主要涉及3个特殊的进程,idle进程(PID = 0), init进程(PID = 1)和kthreadd进程(PID = 2),这三个进程是内核的基础。
- idle进程是Linux系统第一个进程,是init进程和kthreadd进程的父进程
idle进程其pid=0,其前身是系统创建的第一个进程,也是唯一一个没有通过fork或者kernel_thread产生的进程。 - init进程是Linux系统第一个用户进程,是Android系统应用程序的始祖,我们的app都是直接或间接以它为父进程。
- kthreadd进程是Linux系统内核管家,是所有内核进程的父进程,负责所有内核线程的调度与管理。它的任务就是管理和调度其他内核线程kernel_thread,
2 init进程的启动
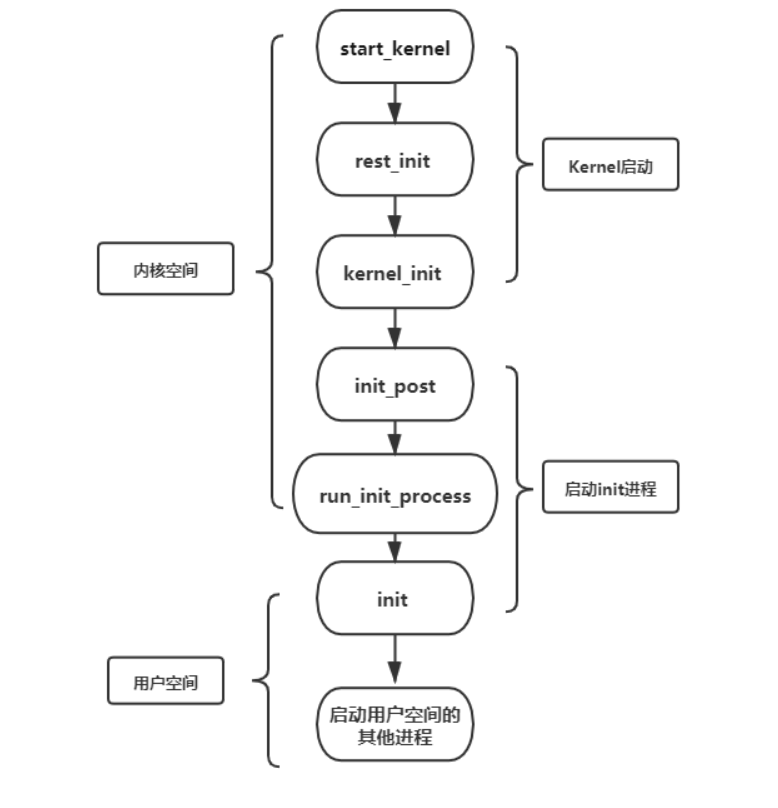
Linux Kernel在启动完毕之后,会找到init进程的执行文件并启动,在Android中,init进程的入口是在:system/core/init中,入口是main.cpp:
kernel/msm-4.4/init/main.c 最终通过run_init_process方法 通过 exceve方式启动进程,具体流程如下图。
static int run_init_process(const char *init_filename)
{
argv_init[0] = init_filename;
return do_execve(getname_kernel(init_filename),
(const char __user *const __user *)argv_init,
(const char __user *const __user *)envp_init);
} 3 init 进程的主要功能
(Init进程启动后,首先挂载文件系统、再挂载相应的分区,启动SELinux安全策略,启动属性服务,解析rc文件,并启动相应属性服务进程,初始化epoll,依次设置signal、property、keychord这3个fd可读时相对应的回调函数。进入无线循环,用来响应各个进程的变化与重建。)
总体流程如下图
init 进程是 Linux 系统中用户空间的第一个进程(pid = 1),init 进程入口函数是 main 函数(main.cpp -> main())。
system/core/init/main.cpp
int main(int argc, char** argv) {
#if __has_feature(address_sanitizer)
__asan_set_error_report_callback(AsanReportCallback);
#endif
//负责设备节点的创建、权限设定等一些列工作
if (!strcmp(basename(argv[0]), "ueventd")) {
return ueventd_main(argc, argv);
}
if (argc > 1) {
//初始化日志系统,
if (!strcmp(argv[1], "subcontext")) {
android::base::InitLogging(argv, &android::base::KernelLogger);
const BuiltinFunctionMap& function_map = GetBuiltinFunctionMap();
return SubcontextMain(argc, argv, &function_map);
}
//启动Selinux安全策略
if (!strcmp(argv[1], "selinux_setup")) {
return SetupSelinux(argv);
}
//启动init进程第二阶段
if (!strcmp(argv[1], "second_stage")) {
return SecondStageMain(argc, argv);
}
}
return FirstStageMain(argc, argv);
}可以看到。main函数是根据传递参数来执行对应不同的功能。(其中,当参数为ueventd 和 subcontext时 对应功能是执行在对应的守护进程中,不属于init进程主要逻辑,此处不过多讨论)
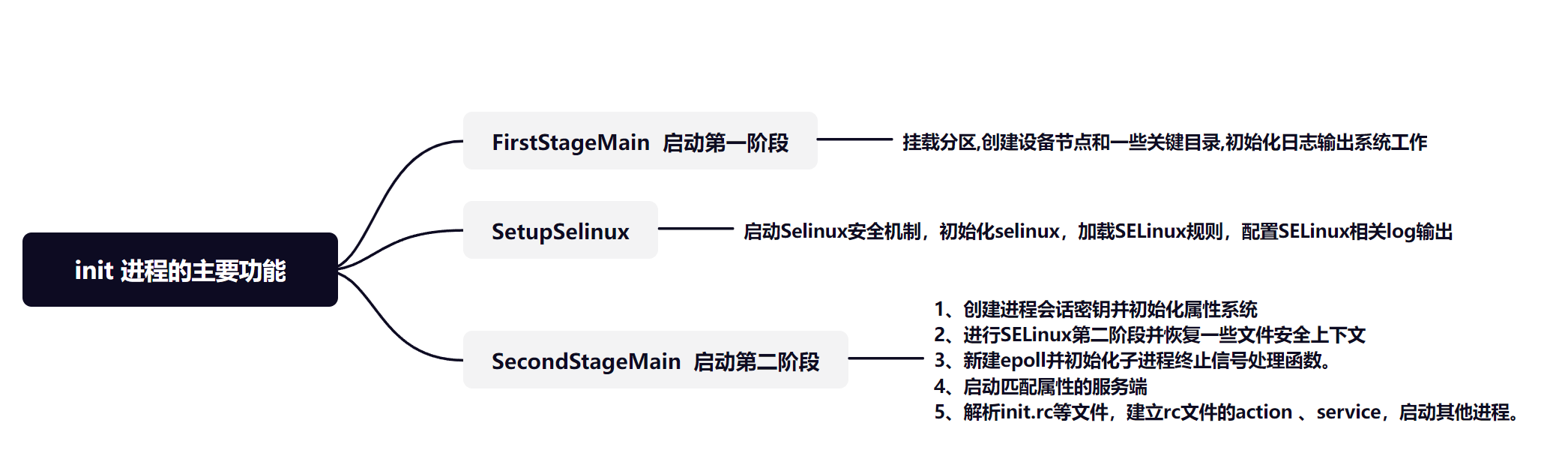
这个函数地功能主要分为3个部分:
1、FirstStageMain 启动第一阶段
挂载分区,创建设备节点和一些关键目录,初始化日志输出系统工作
2、SetupSelinux 加载selinux规则,并设置selinux日志,完成SELinux相关工作
启动Selinux安全机制,初始化selinux,加载SELinux规则,配置SELinux相关log输出
3、SecondStageMain 启动第二阶段
下面就来分析各个阶段的细节
3.1 init 进程第一阶段 FirstStageMain 创建设备节点和一些关键目录
system/core/init/first_stage_init.cpp
主要代码处已经做处了注释,现在来总结下FirstStageMain的工作
init进程第一阶段做的主要工作是挂载分区,创建设备节点和一些关键目录,初始化日志输出系统工作
int FirstStageMain(int argc, char** argv) {
if (REBOOT_BOOTLOADER_ON_PANIC) {
//如果init进程终止,则会重启bootloader
InstallRebootSignalHandlers();
}
boot_clock::time_point start_time = boot_clock::now();
std::vector<std::pair<std::string, int>> errors;
#define CHECKCALL(x) \
if ((x) != 0) errors.emplace_back(#x " failed", errno);
// Clear the umask. 重置文件权限
umask(0);
CHECKCALL(clearenv());
CHECKCALL(setenv("PATH", _PATH_DEFPATH, 1));
// Get the basic filesystem setup we need put together in the initramdisk
// on / and then we'll let the rc file figure out the rest.
// 在ram内存上获取基本的文件系统,剩余的给rc文件
CHECKCALL(mount("tmpfs", "/dev", "tmpfs", MS_NOSUID, "mode=0755"));
CHECKCALL(mkdir("/dev/pts", 0755));
CHECKCALL(mkdir("/dev/socket", 0755));
CHECKCALL(mount("devpts", "/dev/pts", "devpts", 0, NULL));
#define MAKE_STR(x) __STRING(x)
CHECKCALL(mount("proc", "/proc", "proc", 0, "hidepid=2,gid=" MAKE_STR(AID_READPROC)));
#undef MAKE_STR
// Don't expose the raw commandline to unprivileged processes.
CHECKCALL(chmod("/proc/cmdline", 0440));
std::string cmdline;
android::base::ReadFileToString("/proc/cmdline", &cmdline);
gid_t groups[] = {AID_READPROC};
CHECKCALL(setgroups(arraysize(groups), groups));
CHECKCALL(mount("sysfs", "/sys", "sysfs", 0, NULL));
CHECKCALL(mount("selinuxfs", "/sys/fs/selinux", "selinuxfs", 0, NULL));
CHECKCALL(mknod("/dev/kmsg", S_IFCHR | 0600, makedev(1, 11)));
if constexpr (WORLD_WRITABLE_KMSG) {
CHECKCALL(mknod("/dev/kmsg_debug", S_IFCHR | 0622, makedev(1, 11)));
}
CHECKCALL(mknod("/dev/random", S_IFCHR | 0666, makedev(1, 8)));
CHECKCALL(mknod("/dev/urandom", S_IFCHR | 0666, makedev(1, 9)));
// This is needed for log wrapper, which gets called before ueventd runs.
CHECKCALL(mknod("/dev/ptmx", S_IFCHR | 0666, makedev(5, 2)));
CHECKCALL(mknod("/dev/null", S_IFCHR | 0666, makedev(1, 3)));
// These below mounts are done in first stage init so that first stage mount can mount
// subdirectories of /mnt/{vendor,product}/. Other mounts, not required by first stage mount,
// should be done in rc files.
// Mount staging areas for devices managed by vold
// See storage config details at http://source.android.com/devices/storage/
CHECKCALL(mount("tmpfs", "/mnt", "tmpfs", MS_NOEXEC | MS_NOSUID | MS_NODEV,
"mode=0755,uid=0,gid=1000"));
// /mnt/vendor is used to mount vendor-specific partitions that can not be
// part of the vendor partition, e.g. because they are mounted read-write.
CHECKCALL(mkdir("/mnt/vendor", 0755));
// /mnt/product is used to mount product-specific partitions that can not be
// part of the product partition, e.g. because they are mounted read-write.
CHECKCALL(mkdir("/mnt/product", 0755));
// /debug_ramdisk is used to preserve additional files from the debug ramdisk
CHECKCALL(mount("tmpfs", "/debug_ramdisk", "tmpfs", MS_NOEXEC | MS_NOSUID | MS_NODEV,
"mode=0755,uid=0,gid=0"));
#undef CHECKCALL
SetStdioToDevNull(argv);
// Now that tmpfs is mounted on /dev and we have /dev/kmsg, we can actually
// talk to the outside world...
// 初始化kernel Log系统
InitKernelLogging(argv);
if (!errors.empty()) {
for (const auto& [error_string, error_errno] : errors) {
LOG(ERROR) << error_string << " " << strerror(error_errno);
}
LOG(FATAL) << "Init encountered errors starting first stage, aborting";
}
LOG(INFO) << "init first stage started!";
auto old_root_dir = std::unique_ptr<DIR, decltype(&closedir)>{opendir("/"), closedir};
if (!old_root_dir) {
PLOG(ERROR) << "Could not opendir(\"/\"), not freeing ramdisk";
}
struct stat old_root_info;
if (stat("/", &old_root_info) != 0) {
PLOG(ERROR) << "Could not stat(\"/\"), not freeing ramdisk";
old_root_dir.reset();
}
auto want_console = ALLOW_FIRST_STAGE_CONSOLE ? FirstStageConsole(cmdline) : 0;
if (!LoadKernelModules(IsRecoveryMode() && !ForceNormalBoot(cmdline), want_console)) {
if (want_console != FirstStageConsoleParam::DISABLED) {
LOG(ERROR) << "Failed to load kernel modules, starting console";
} else {
LOG(FATAL) << "Failed to load kernel modules";
}
}
if (want_console == FirstStageConsoleParam::CONSOLE_ON_FAILURE) {
StartConsole();
}
if (ForceNormalBoot(cmdline)) {
mkdir("/first_stage_ramdisk", 0755);
// SwitchRoot() must be called with a mount point as the target, so we bind mount the
// target directory to itself here.
if (mount("/first_stage_ramdisk", "/first_stage_ramdisk", nullptr, MS_BIND, nullptr) != 0) {
LOG(FATAL) << "Could not bind mount /first_stage_ramdisk to itself";
}
SwitchRoot("/first_stage_ramdisk");
}
// If this file is present, the second-stage init will use a userdebug sepolicy
// and load adb_debug.prop to allow adb root, if the device is unlocked.
if (access("/force_debuggable", F_OK) == 0) {
std::error_code ec; // to invoke the overloaded copy_file() that won't throw.
if (!fs::copy_file("/adb_debug.prop", kDebugRamdiskProp, ec) ||
!fs::copy_file("/userdebug_plat_sepolicy.cil", kDebugRamdiskSEPolicy, ec)) {
LOG(ERROR) << "Failed to setup debug ramdisk";
} else {
// setenv for second-stage init to read above kDebugRamdisk* files.
setenv("INIT_FORCE_DEBUGGABLE", "true", 1);
}
}
if (!DoFirstStageMount()) {
LOG(FATAL) << "Failed to mount required partitions early ...";
}
struct stat new_root_info;
if (stat("/", &new_root_info) != 0) {
PLOG(ERROR) << "Could not stat(\"/\"), not freeing ramdisk";
old_root_dir.reset();
}
if (old_root_dir && old_root_info.st_dev != new_root_info.st_dev) {
FreeRamdisk(old_root_dir.get(), old_root_info.st_dev);
}
SetInitAvbVersionInRecovery();
setenv(kEnvFirstStageStartedAt, std::to_string(start_time.time_since_epoch().count()).c_str(),
1);
//execv 启动init进程
const char* path = "/system/bin/init";
const char* args[] = {path, "selinux_setup", nullptr};
auto fd = open("/dev/kmsg", O_WRONLY | O_CLOEXEC);
dup2(fd, STDOUT_FILENO);
dup2(fd, STDERR_FILENO);
close(fd);
execv(path, const_cast<char**>(args));
// execv() only returns if an error happened, in which case we
// panic and never fall through this conditional.
PLOG(FATAL) << "execv(\"" << path << "\") failed";
return 1;
}3.2 SetupSelinux 启动安全机制
第一阶段在最后通过execv 方式启动了 init进程 进入了init进程的主函数, system/core/init/main.cpp。最终调用了SetupSelinux 方法。这个方法主要是启动Selinux安全机制。
说明:初始化selinux,加载SELinux规则,配置SELinux相关log输出,并启动第二阶段
SELinux是「Security-Enhanced Linux」的简称,是美国国家安全局「NSA=The National Security Agency」 和SCC(Secure Computing Corporation)开发的 Linux的一个扩张强制访问控制安全模块。
system/core/init/selinux.cpp
int SetupSelinux(char** argv) {
SetStdioToDevNull(argv);
InitKernelLogging(argv);
if (REBOOT_BOOTLOADER_ON_PANIC) {
InstallRebootSignalHandlers();
}
boot_clock::time_point start_time = boot_clock::now();
MountMissingSystemPartitions();
// Set up SELinux, loading the SELinux policy. 初始化相关log,加载SeLinux相关规则。
SelinuxSetupKernelLogging();
SelinuxInitialize();
// We're in the kernel domain and want to transition to the init domain. File systems that
// store SELabels in their xattrs, such as ext4 do not need an explicit restorecon here,
// but other file systems do. In particular, this is needed for ramdisks such as the
// recovery image for A/B devices.
if (selinux_android_restorecon("/system/bin/init", 0) == -1) {
PLOG(FATAL) << "restorecon failed of /system/bin/init failed";
}
setenv(kEnvSelinuxStartedAt, std::to_string(start_time.time_since_epoch().count()).c_str(), 1);
//启动init 进程第二阶段
const char* path = "/system/bin/init";
const char* args[] = {path, "second_stage", nullptr};
execv(path, const_cast<char**>(args));
// execv() only returns if an error happened, in which case we
// panic and never return from this function.
PLOG(FATAL) << "execv(\"" << path << "\") failed";
return 1;
}3.3 init 进程第二阶段 SecondStageMain (解析 rc文件并 启动zygote进程)
1、创建进程会话密钥并初始化属性系统
2、进行SELinux第二阶段并恢复一些文件安全上下文
3、新建epoll并初始化子进程终止信号处理函数。详细看第五节-信号处理
4、启动匹配属性的服务端, 详细查看第六节-属性服务
5、解析init.rc等文件,建立rc文件的action 、service,启动其他进程。rc文件解析和启动
int SecondStageMain(int argc, char** argv) {
//init 进程crash时重启引导加载程序
if (REBOOT_BOOTLOADER_ON_PANIC) {
InstallRebootSignalHandlers();
}
boot_clock::time_point start_time = boot_clock::now();
trigger_shutdown = [](const std::string& command) { shutdown_state.TriggerShutdown(command); };
SetStdioToDevNull(argv);
InitKernelLogging(argv);
LOG(INFO) << "init second stage started!";
// Update $PATH in the case the second stage init is newer than first stage init, where it is
// first set.
if (setenv("PATH", _PATH_DEFPATH, 1) != 0) {
PLOG(FATAL) << "Could not set $PATH to '" << _PATH_DEFPATH << "' in second stage";
}
// Init should not crash because of a dependence on any other process, therefore we ignore
// SIGPIPE and handle EPIPE at the call site directly. Note that setting a signal to SIG_IGN
// is inherited across exec, but custom signal handlers are not. Since we do not want to
// ignore SIGPIPE for child processes, we set a no-op function for the signal handler instead.
{
struct sigaction action = {.sa_flags = SA_RESTART};
action.sa_handler = [](int) {};
sigaction(SIGPIPE, &action, nullptr);
}
// Set init and its forked children's oom_adj.
// 设置 init 和 forke出来的进程的优先级
if (auto result =
WriteFile("/proc/1/oom_score_adj", StringPrintf("%d", DEFAULT_OOM_SCORE_ADJUST));
!result.ok()) {
LOG(ERROR) << "Unable to write " << DEFAULT_OOM_SCORE_ADJUST
<< " to /proc/1/oom_score_adj: " << result.error();
}
// Set up a session keyring that all processes will have access to. It
// will hold things like FBE encryption keys. No process should override
// its session keyring.
// 设置所有进程访问的会话秘钥(类似于File-Based Encryption 加密秘钥)
keyctl_get_keyring_ID(KEY_SPEC_SESSION_KEYRING, 1);
// Indicate that booting is in progress to background fw loaders, etc.
close(open("/dev/.booting", O_WRONLY | O_CREAT | O_CLOEXEC, 0000));
// See if need to load debug props to allow adb root, when the device is unlocked.
const char* force_debuggable_env = getenv("INIT_FORCE_DEBUGGABLE");
bool load_debug_prop = false;
if (force_debuggable_env && AvbHandle::IsDeviceUnlocked()) {
load_debug_prop = "true"s == force_debuggable_env;
}
unsetenv("INIT_FORCE_DEBUGGABLE");
// Umount the debug ramdisk so property service doesn't read .prop files from there, when it
// is not meant to.
if (!load_debug_prop) {
UmountDebugRamdisk();
}
//初始化相关系统属性,使用mmap共享内存。
PropertyInit();
// Umount second stage resources after property service has read the .prop files.
UmountSecondStageRes();
// Umount the debug ramdisk after property service has read the .prop files when it means to.
if (load_debug_prop) {
UmountDebugRamdisk();
}
// Mount extra filesystems required during second stage init
MountExtraFilesystems();
// Now set up SELinux for second stage.
SelinuxSetupKernelLogging();
SelabelInitialize();
SelinuxRestoreContext();
//使用IO复用机制,epoll
Epoll epoll;
if (auto result = epoll.Open(); !result.ok()) {
PLOG(FATAL) << result.error();
}
//使用epoll机制监听子进程的信号
InstallSignalFdHandler(&epoll);
InstallInitNotifier(&epoll);
// 初始化并开启系统属性服务
StartPropertyService(&property_fd);
// Make the time that init stages started available for bootstat to log.
RecordStageBoottimes(start_time);
// Set libavb version for Framework-only OTA match in Treble build.
if (const char* avb_version = getenv("INIT_AVB_VERSION"); avb_version != nullptr) {
SetProperty("ro.boot.avb_version", avb_version);
}
unsetenv("INIT_AVB_VERSION");
fs_mgr_vendor_overlay_mount_all();
export_oem_lock_status();
MountHandler mount_handler(&epoll);
SetUsbController();
const BuiltinFunctionMap& function_map = GetBuiltinFunctionMap();
Action::set_function_map(&function_map);
if (!SetupMountNamespaces()) {
PLOG(FATAL) << "SetupMountNamespaces failed";
}
InitializeSubcontext();
ActionManager& am = ActionManager::GetInstance();
ServiceList& sm = ServiceList::GetInstance();
//加载系统启动脚本"/init.rc" 解析脚本中的action service,启动相关进程
LoadBootScripts(am, sm);
// Turning this on and letting the INFO logging be discarded adds 0.2s to
// Nexus 9 boot time, so it's disabled by default.
if (false) DumpState();
// Make the GSI status available before scripts start running.
auto is_running = android::gsi::IsGsiRunning() ? "1" : "0";
SetProperty(gsi::kGsiBootedProp, is_running);
auto is_installed = android::gsi::IsGsiInstalled() ? "1" : "0";
SetProperty(gsi::kGsiInstalledProp, is_installed);
am.QueueBuiltinAction(SetupCgroupsAction, "SetupCgroups");
am.QueueBuiltinAction(SetKptrRestrictAction, "SetKptrRestrict");
am.QueueBuiltinAction(TestPerfEventSelinuxAction, "TestPerfEventSelinux");
am.QueueEventTrigger("early-init");
// Queue an action that waits for coldboot done so we know ueventd has set up all of /dev...
am.QueueBuiltinAction(wait_for_coldboot_done_action, "wait_for_coldboot_done");
// ... so that we can start queuing up actions that require stuff from /dev.
am.QueueBuiltinAction(SetMmapRndBitsAction, "SetMmapRndBits");
Keychords keychords;
am.QueueBuiltinAction(
[&epoll, &keychords](const BuiltinArguments& args) -> Result<void> {
for (const auto& svc : ServiceList::GetInstance()) {
keychords.Register(svc->keycodes());
}
keychords.Start(&epoll, HandleKeychord);
return {};
},
"KeychordInit");
// Trigger all the boot actions to get us started.
am.QueueEventTrigger("init");
// Don't mount filesystems or start core system services in charger mode.
std::string bootmode = GetProperty("ro.bootmode", "");
if (bootmode == "charger") {
am.QueueEventTrigger("charger");
} else {
am.QueueEventTrigger("late-init");
}
// Run all property triggers based on current state of the properties.
am.QueueBuiltinAction(queue_property_triggers_action, "queue_property_triggers");
// Restore prio before main loop
setpriority(PRIO_PROCESS, 0, 0);
//解析脚本并启动相关服务
while (true) {
// By default, sleep until something happens.
auto epoll_timeout = std::optional<std::chrono::milliseconds>{};
auto shutdown_command = shutdown_state.CheckShutdown();
if (shutdown_command) {
LOG(INFO) << "Got shutdown_command '" << *shutdown_command
<< "' Calling HandlePowerctlMessage()";
HandlePowerctlMessage(*shutdown_command);
shutdown_state.set_do_shutdown(false);
}
if (!(prop_waiter_state.MightBeWaiting() || Service::is_exec_service_running())) {
am.ExecuteOneCommand();
}
if (!IsShuttingDown()) {
auto next_process_action_time = HandleProcessActions();
// If there's a process that needs restarting, wake up in time for that.
if (next_process_action_time) {
epoll_timeout = std::chrono::ceil<std::chrono::milliseconds>(
*next_process_action_time - boot_clock::now());
if (*epoll_timeout < 0ms) epoll_timeout = 0ms;
}
}
if (!(prop_waiter_state.MightBeWaiting() || Service::is_exec_service_running())) {
// If there's more work to do, wake up again immediately.
if (am.HasMoreCommands()) epoll_timeout = 0ms;
}
auto pending_functions = epoll.Wait(epoll_timeout);
if (!pending_functions.ok()) {
LOG(ERROR) << pending_functions.error();
} else if (!pending_functions->empty()) {
// We always reap children before responding to the other pending functions. This is to
// prevent a race where other daemons see that a service has exited and ask init to
// start it again via ctl.start before init has reaped it.
ReapAnyOutstandingChildren();
for (const auto& function : *pending_functions) {
(*function)();
}
}
if (!IsShuttingDown()) {
HandleControlMessages();
SetUsbController();
}
}
return 0;
}
4 总结
init进程第一阶段做的主要工作是挂载分区,创建设备节点和一些关键目录,初始化日志输出系统,启用SELinux安全策略。
init进程第二阶段主要工作是初始化属性系统,解析SELinux的匹配规则,处理子进程终止信号,启动系统属性服务,可以说每一项都很关键,如果说第一阶段是为属性系统,SELinux做准备,那么第二阶段就是真正去把这些功能落实。
init进行第三阶段主要是解析init.rc 来启动其他进程,进入无限循环,进行子进程实时监控,处理添加到事件队列中的事件。



近期评论